카메라 성능 특성
열화상 카메라의 시스템 성능 평가는 잘 표준화되어 있습니다. 그러나 일반적으로 대부분의 실무자가 시스템 성능 매개변수의 관련성을 응용 프로그램 및 측정 결과와 연관시키는 것이 어렵습니다.
열화상 시스템의 성능은 열 응답, 검출기 및 전자 노이즈, 기하학적 해상도, 정확도, 스펙트럼 범위, 프레임 속도, 통합 시간 등과 같은 여러 매개변수로 설명됩니다.
NETD에서 제공하는 온도 분해능과 IFOV에서 제공하는 공간 분해능은 중요한 객관적 성능 매개변수입니다. 둘 다 이미지 품질에 큰 영향을 미칩니다. 실제 열화상 카메라의 품질 및 성능 한계를 평가하려면 이러한 매개변수의 조합이 필요합니다.
또한 관찰자에 의한 주관적인 요인(카메라 시스템을 사용하는 동안 온도 차이를 감지, 인식 및 식별하는 능력)을 고려해야 합니다.
MRTD와 MDTD는 객관적인 매개변수와 주관적인 매개변수가 결합된 형태입니다.
실제적인 열화상 이미징의 경우 다음 질문에 대한 답을 찾아야 합니다.
카메라가 성능 매개변수를 기준으로 내 애플리케이션에 적합한가?
사용된 열화상 시스템의 가장 중요한 성능 한계와 애플리케이션과의 관련성에 대한 정확한 지식은 정확한 온도 측정 및 결과 해석에 매우 중요합니다.
온도 정확도(Temperature Accuracy)
온도 정확도는 흑체 온도 측정에 대한 온도 측정 오류의 절대값입니다. 대부분의 IR 카메라의 경우 절대 온도 정확도는 ±2°C 또는 측정된 온도의 ±2%로 지정됩니다. 둘 중 더 큰 값이 유효합니다.
온도 측정 오류는 보정 절차와 관련된 복사 측정의 오류, 카메라 감도의 장단기적 변동성, 측정된 복사 에너지에서 물체 복사 계산의 제한된 정확도 등의 결과로 발생합니다. 켜짐. 온도 측정의 단기 재현성을 위해 ±1% 또는 ±1 °C의 값이 일반적입니다.
온도분해능(Temperature Resolution – Noise Equivalent Temperature Difference (NETD))
온도 분해능은 열화상 카메라의 열 감도를 정량화하는 NETD에 의해 계산됩니다. 온도 분해능은 카메라의 SNR이 1일 때 흑체 물체와 흑체 배경 사이의 최소 온도 차이를 나타냅니다. NETD는 시스템 노이즈와 신호 전달 함수에 의해 결정됩니다.
실험적으로 NETD는 측정된 온도의 변동으로부터 결정될 수 있고 가열되고 온도 안정화된 흑체로부터의 복사를 분석할 수 있습니다.
각 흑체 온도에 대해 천 개의 이미지를 사용하여 지점 온도 측정이 기록되었습니다(초당 50개의 이미지로 약 20초 소요).
다음 그림은 측정된 특정 픽셀의 온도를 시간의 함수로 나타낸 그래프입니다. 소스의 열 변화가 훨씬 더 큰 시간 척도에서 발생하기 때문에 이미징 시스템의 열 노이즈를 잘 표현해 줍니다.

다음 그림은 측정된 스팟 온도의 분포로 표준화된 정규 분포에 의해 근사화될 수 있습니다.

측정된 온도 데이터를 사용하여 NETD를 정의하는 온도 변동의 제곱 평균(rms) 값을 계산할 수 있습니다. 위의 그림에서는 NETD는 0.065K입니다.
실험적 NETD는 표준화된 정규 분포의 절반 너비를 나타냅니다. 이는 측정된 온도의 68.3%가 T = (34.50 ± 0.065) °C 범위 내에 있음을 의미합니다.
공간 해상도(Spatial Resolution)
IFOV는 FPA의 하나의 검출기 요소가 물체 복사를 감지하는 각도를 의미합니다.
이미지가 주어진 거리에 대해 단일 검출기 요소에 맞는 최소 물체 크기는 다음 식처럼 계산됩니다.
물체 크기 = IFOV x 거리
예를 들어, f = 50mm의 초점 거리와 50μm의 단일 픽셀 크기는 1밀리라디안(mrad)의 IFOV가 됩니다. 거리 D = 5.5m에서 이 IFOV는 5.5mm의 최소 물체 크기를 나타냅니다.
IFOV는 검출기 크기와 광학 장치의 초점 거리에서 계산된 기하학적 값입니다. IFOV는 FOV를 픽셀 수로 나누어 결정할 수도 있습니다.
예를 들어 IFOV는 20° FOV 및 320픽셀의 경우 1mrad입니다.
시스템 해상도는 광학 장치의 회절에 의해 추가로 영향을 받습니다. 이것은 가변 슬릿 폭을 가진 슬릿 크기 객체에 대한 시스템 응답의 정규화된 종속성으로 정의되는 SRF에 의해 설명됩니다.
다음 그림은 SRF의 측정 방법을 보여주고 있습니다. 각도 Θ는 검출기에서 본 주어진 슬릿 폭에서 관찰 가능한 슬릿 각도입니다. 흑체는 열화상 카메라에서 5.5m 떨어진 곳에서 95°C의 온도로 가열되었습니다. 물체 크기는 가변 슬릿에 의해 30mm에서 1mm로 변경되었습니다. 온도는 슬릿 폭에 수직인 선을 따라 측정되었습니다. 물체의 크기, 즉 슬릿 폭이 작아질수록 피크 출력이 작아집니다.
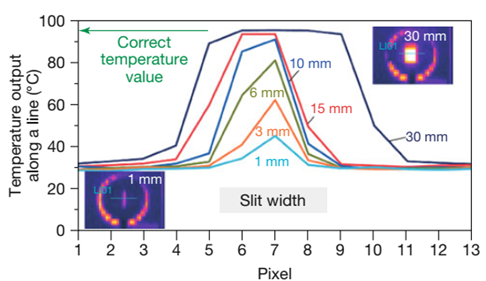
SRF는 슬릿 폭에서 측정된 물체 신호 차이의 함수를 나타냅니다. SRF는 각 슬릿 폭에 대한 피크 출력으로 계산할 수 있습니다.

이미징 해상도는 일반적으로 SRF에서 50% 응답을 제공하는 카메라에서 본 물체의 각도 너비로 정의됩니다. 그러나 정확한 온도 측정을 위한 물체의 절대 최소 크기는 95%에 도달하기 위해 IFOV의 2~3배입니다. 또는 SRF의 99%, 각각. 이상적인 SRF로부터의 편차는 카메라 광학의 수차로 인해 발생합니다.
이 결과로부터 정확한 온도 측정을 위해 필요한 최소 물체 크기는 실제 측정 거리에 대해 앞서 주어진 공식을 사용하여 물체 크기에 2 또는 3의 인수를 곱하여 쉽게 계산할 수 있습니다.
'열화상 카메라 (Infrared Thermal Camera)' 카테고리의 다른 글
| [열화상 카메라] 열상카메라의 특성들 (0) | 2022.07.26 |
|---|---|
| [열화상카메라] 영상품질(MTF, MRTD) (0) | 2022.03.28 |
| [열화상 카메라] NUC (0) | 2022.03.02 |
| [열화상 카메라] NETD (0) | 2022.02.25 |
| [열화상 카메라] 검출기 (0) | 2022.02.24 |